Зачёт.Ru
База готовых студенческих работ
Задача 276 по ТАУ, Бесекерский В.А.
276. Произвести выбор последовательного корректирующего устройства для системы автоматического регулирования. Передаточная функция разомкнутой системы без коррекции имеет вид:
=\frac{K}{(1+T_{1}p)(1+T_{2}p)(1+T_{3}p)}")
Где Т1=0,05 сек, Т2=0,1 сек, Т3=0,2 сек. Скорректированная система должна обеспечивать следующие показатели качества переходного процесса при ступенчатом управляющем воздействии: а) перерегулирование σ≤20%; б) время затухания переходного процесса tп≤0,6 сек при числе колебаний n≤3; в) установившаяся ошибка Δ не должна превышать 3%.
Решение:
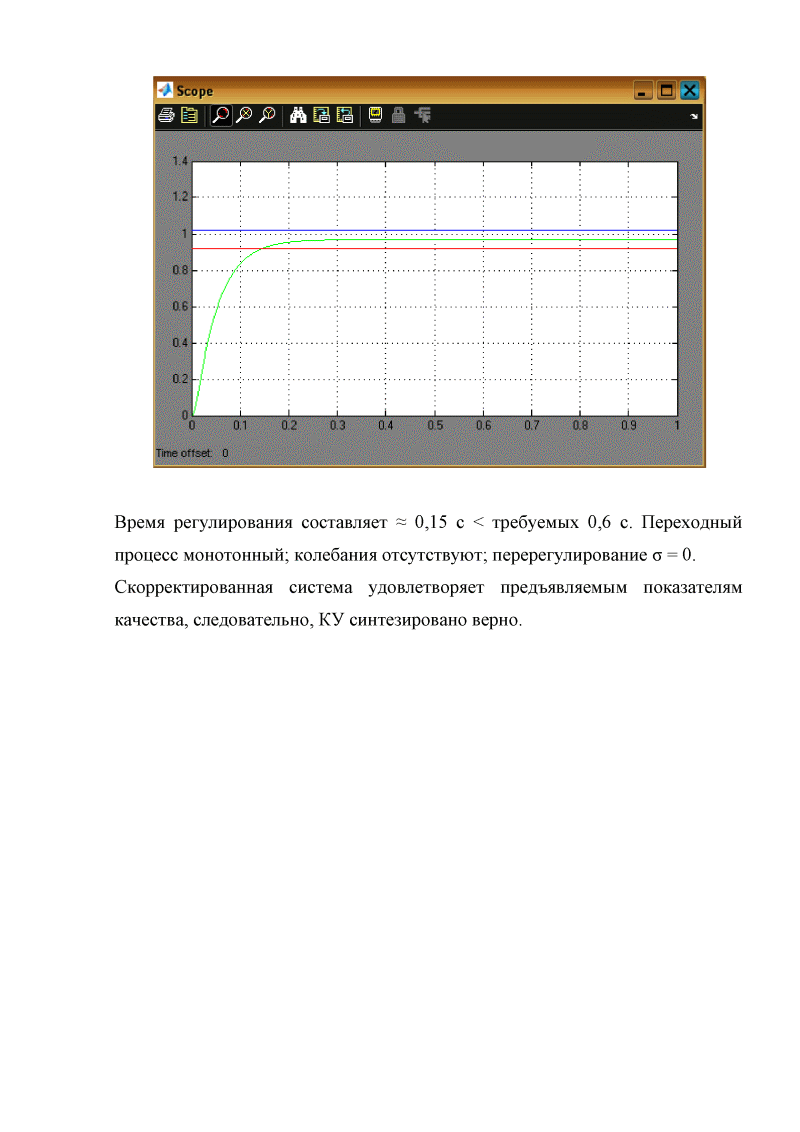
Уменьшенную копию первой и последней страниц решения можно посмотреть ниже:
из СБОРНИКА ЗАДАЧ ПО ТЕОРИИ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ И УПРАВЛЕНИЯ
Под редакцией В.А. Бесекерского
Формат файлов PDF + XMCD, MathCad + MDL, MATLAB (в архиве ZIP)
Решение выполнено с использованием номограмм Солодовникова
Полный список решенных задач из сборника задач по теории автоматического регулирования и управления, В.А. Бесекерский вы можете посмотреть тут.
Максим 28 февраля, 2016
Posted In: 3. Частотные методы выбора параметров САР. Расчёт последовательных корректирующих устройств, 6. Синтез линейных систем, Задача, Платные работы, Сборник задач по теории автоматического регулирования и управления под редакцией В.А.Бесекерского, ТАУ