Зачёт.Ru
База готовых студенческих работ
Задача № 74 по ТАУ, В.А. Бесекерский
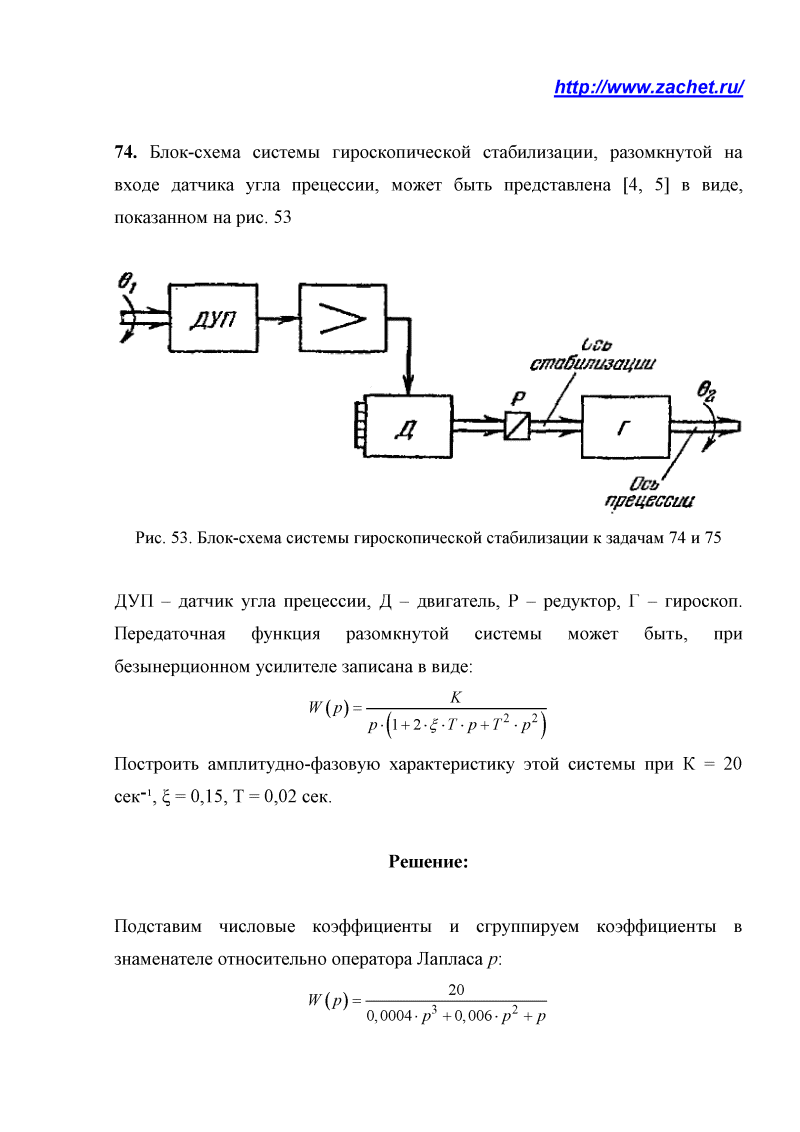
74. Блок-схема системы гироскопической стабилизации, разомкнутой на входе датчика угла прецессии, может быть представлена [4, 5] в виде, показанном на рис. 53
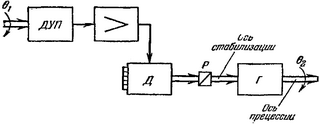
Рис. 53. Блок-схема системы гироскопической стабилизации к задачам 74 и 75
ДУП – датчик угла прецессии, Д – двигатель, Р – редуктор, Г – гироскоп. Передаточная функция разомкнутой системы может быть, при безынерционном усилителе записана в виде:
=\frac{K}{p\cdot \left ( 1+2\cdot \xi \cdot p+T^{2}\cdot p^{2} \right )}")
Построить амплитудно-фазовую характеристику этой системы при К=20 сек-1, ξ=0,15, Т2=0,02 сек.
Решение:
Уменьшенную копию первой cтраницы содержимого можно посмотреть ниже:
из СБОРНИКА ЗАДАЧ ПО ТЕОРИИ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ И УПРАВЛЕНИЯ
Под редакцией В.А. Бесекерского
Формат файла PDF (в архиве ZIP)
Список решенных задач из задачника по ТАУ, В.А.Бесекерского вы можете посмотреть тут.
Максим 31 декабря, 2015
Posted In: 2. Амплитудно-фазовые характеристики разомкнутых САР, 2. Частотные характеристики динамических звеньев и САР, Задача, Платные работы, Сборник задач по теории автоматического регулирования и управления под редакцией В.А.Бесекерского, ТАУ